رباط مشارکتی

فاقد توضیحات...
فاقد توضیحات...
[[ comment.sender ]]
[[ comment.description ]]
[[ reply.sender ]] (در پاسخ به [[comment.sender]])
[[ reply.description ]]
رباطهای مشارکتی ؛ اجزا و کاربردهای آن در صنعت
در چشمانداز صنعتی مدرن امروزی، رباتهای مشارکتی مفهوم تعامل انسان و ربات را متحول کردهاند. این رباتها به طور خاص برای کار در کنار اپراتورهای انسانی طراحی شده اند و به افزایش بهره وری، کارایی و ایمنی در صنایع مختلف کمک میکنند. با کنکاش در جزئیات پیچیده اجزای مختلف شامل رباتهای مشارکتی، میتوانیم ویژگیهای اساسی را که آنها را به داراییهای ارزشمندی در محل کار تبدیل میکند، کشف کنیم.
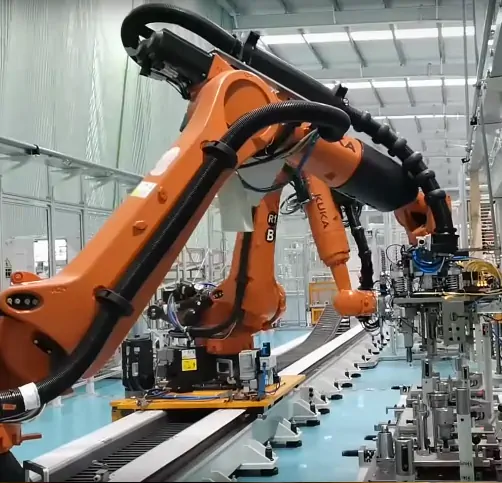
بازوی ربات
در هسته هر ربات مشارکتی، بازوی ربات، مشابه ساختار بازوی انسان قرار دارد. این بازوی مکانیکی متشکل از بخشهای متعددی است که توسط مفاصل به هم متصل شده اند، به عنوان موجودیت فیزیکی اصلی مسئول اجرای طیف گسترده ای از حرکات عمل میکند. بازوی ربات با تقلید از انعطاف پذیری و مهارت بازوی انسان، رباتها را قادر میسازد تا با دقت و دقت به اشیا دست یابند.
گریپر
اساساً دست رباتیک ربات مشارکتی، نقشی حیاتی در عملکرد کلی سیستم ایفا میکند. گیره که به عنوان رابط بین ربات و شی مورد دستکاری عمل میکند، وظیفه گرفتن، نگه داشتن و رها کردن ایمن اشیا را با نیرو و فشار کنترل شده بر عهده دارد. بسته به نیازهای کاربردی، گیرهها را میتوان به عنوان انگشتان مبتنی بر خلا، مکانیکی، مغناطیسی یا حتی تخصصی طراحی کرد که امکان سازگاری بهینه را با مجموعه وسیعی از اشیا فراهم میکند.
افکتورها
به عنوان ابزار یا وسیله ای که به مچ دست ربات متصل است، رباتهای همکار را قادر میسازد تا وظایف خاصی را با نهایت دقت انجام دهند. افکتورهای انتهایی برای مطابقت با نیازهای کاربردی مختلف مانند جوشکاری، رنگ آمیزی، مونتاژ یا بسته بندی سفارشی میشوند. نمونههایی از افکتورهای انتهایی عبارتند از مشعلهای جوشکاری، مکندهها، دوربینها، پیچ گوشتیها یا هر ابزار تخصصی دیگری که برای یک فرآیند خاص مورد نیاز است.
حسگرها
ادغام حسگرها برای تقویت توانایی یک ربات مشارکتی برای درک دقیق محیط و تعامل ایمن با انسان ضروری است. این سنسورها عملکردی حیاتی در دستیابی به کنترل دقیق و جلوگیری از برخورد دارند. برخی از انواع حسگرهای کلیدی که معمولاً در رباتهای مشارکتی یافت میشوند عبارتند از
- سیستمهای بینایی با استفاده از دوربینها یا سیستمهای تصویربرداری سه بعدی پیشرفته، رباتهای مشارکتی میتوانند اشیا را تشخیص دهند، موقعیت و جهت آنها را تعیین کنند و عملیات انتخاب و جابهجایی دقیق یا وظایف هدایتشده بصری را امکانپذیر کنند.
- سنسورهای گشتاور این حسگرها که در بازوی ربات تعبیه شده اند، نیروهای وارد شده در هنگام تعامل با محیط را تشخیص میدهند. با اندازه گیری مداوم نیروها و گشتاورهای تجربه شده در طول تماس فیزیکی، کوباتها میتوانند به سرعت به رویدادهای غیرمنتظره مانند ضربههای تصادفی یا نیروهای بیش از حد واکنش نشان دهند.
- حسگرهای مجاورت این حسگرها بر اساس اصل تشخیص وجود یا عدم وجود اشیا در فضای کاری ربات کار میکنند. رباتهای مشارکتی میتوانند از حسگرهای مجاورت مادون قرمز، اولتراسونیک یا خازنی برای اطمینان از ایمنی انسانها با راهاندازی پروتکلهای ایمنی از پیش تعریفشده در صورت هرگونه خطر برخورد احتمالی استفاده کنند.
سیستم کنترل
سیستم کنترل ستون فقرات رباطهای مشارکتی را تشکیل میدهد که نشان دهنده هوش متمرکز است. این سیستم پیچیده که شامل اجزای سخت افزاری و نرم افزاری است، عملکردهای مختلف ربات را هماهنگ میکند. سیستم کنترل معمولاً شامل میکروکنترلرها یا پردازندهها، درایورهای موتور، مدارهای ایمنی و رابطهای برنامه نویسی است. دستورات را از اپراتورهای انسانی یا سیستمهای خارجی دریافت میکند و آنها را به اقدامات مناسب انجام شده توسط ربات ترجمه میکند.
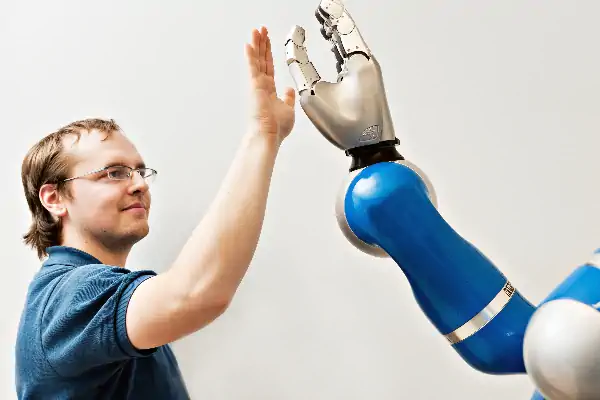
ویژگیهای ایمنی
یکی از جنبههای کلیدی که رباطهای مشارکتی را از رباتهای صنعتی سنتی متمایز میکند، تمرکز آنها بر ایمنی است. رباتهای مشارکتی مجموعهای از ویژگیهای ایمنی را برای اطمینان از رفاه انسانهایی که در کنار آنها کار میکنند، ترکیب میکنند. این اقدامات ایمنی عبارتند از
- محدود کردن نیرو مفاصل بازوی ربات مجهز به حسگرهای نیرو هستند که به طور مداوم نیروهای وارد شده در طول فعل و انفعالات فیزیکی را کنترل میکنند. در صورت برخورد غیرمنتظره یا نیروی بیش از حد، کوبات میتواند فوراً با کاهش نیروی خروجی یا توقف فوری حرکت خود واکنش نشان دهد.
- نظارت بر سرعت و جداسازی رباطهای مشارکتی به سیستمهای نظارت بر سرعت و جداسازی مجهز هستند تا از تعامل ایمن با اپراتورهای انسانی اطمینان حاصل کنند. با نظارت بر سرعت و فاصله بین کوبات و انسانهای نزدیک، سیستم میتواند سرعت حرکت ربات را تنظیم کند یا آن را به طور کامل متوقف کند تا از هرگونه برخورد یا تصادف بالقوه جلوگیری کند.
- تشخیص برخورد با استفاده از ترکیبی از حسگرها و منطق برنامه نویسی پیشرفته، رباتهای مشارکتی میتوانند برخوردهای احتمالی را در زمان واقعی تشخیص دهند. به محض تشخیص برخورد قریب الوقوع، سیستم به سرعت حرکت ربات را متوقف میکند و از هر گونه آسیب به اشیا یا آسیب به انسان جلوگیری میکند.
- دکمه توقف اضطراری در موقعیت برجسته برای دسترسی، دکمه توقف اضطراری امکان خاموش کردن دستی فوری ربات مشترک را در مواقع اضطراری یا شرایط ناامن فراهم میکند.
فهرست محصولات تولید شده با رباطهای مشارکتی
رباتهای مشارکتی، که به عنوان cobot نیز شناخته میشوند، با ارائه انعطافپذیری، کارایی و ایمنی بیشتر، صنعت تولید را متحول کردهاند. این ماشینهای همه کاره میتوانند در کنار اپراتورهای انسانی کار کنند و در طیف وسیعی از فرآیندهای تولید کمک کنند. بیایید فهرست گستردهای از محصولاتی را که میتوان با کمک رباتهای مشترک تولید کرد، بررسی کنیم و قابلیتها و تأثیرات متنوع آنها را در صنایع مختلف نشان دهیم.
قطعات الکترونیکی
رباتهای مشارکتی برای مونتاژ قطعات الکترونیکی، از جمله بردهای مدار چاپی (PCB)، حسگرها، کانکتورها و قطعات الکتریکی مینیاتوری ایدهآل هستند. با حرکات دقیق و تکرارپذیری بالا، کوباتها میتوانند اجزای ظریف، لحیم کاری، بازرسی و بسته بندی را با دقت استثنایی انجام دهند.
قطعات خودرو
در صنعت خودروسازی، رباتهای مشارکتی کاربرد گستردهای در ساخت قطعات مختلف مانند اجزای موتور، سیستمهای انتقال، قطعات داخلی، سنسورها و مجموعههای فرعی پیدا میکنند. رباطهای مشارکتی میتوانند کارهایی مانند جوشکاری، مونتاژ، بازرسی و حتی حرکات پیچیده مورد نیاز برای کنترل کیفیت دقیق در تولید خودرو را انجام دهند.
لوازم الکترونیکی مصرفی
رباتهای مشارکتی نقش مهمیدر تولید لوازم الکترونیکی مصرفی مانند گوشیهای هوشمند، تبلتها، لپ تاپها و دستگاههای صوتی ایفا میکنند. کوباتها با توانایی خود در رسیدگی به قطعات کوچک، به قرار دادن دقیق قطعات، مونتاژ برد مدار، کنترل کیفیت و بسته بندی کمک میکنند و فرآیندهای تولید کارآمد و استاندارد را تضمین میکنند.
تجهیزات پزشکی
رباطهای مشارکتی به طور گسترده در تولید وسایل پزشکی از جمله ابزار جراحی، پروتز، تجهیزات تشخیصی و ایمپلنتهای پزشکی استفاده میشوند. این رباتها میتوانند در ماشینکاری دقیق، مونتاژ اجزای پیچیده، بازرسی کیفیت و بستهبندی، اطمینان از ثبات، دقت و رعایت مقررات سختگیرانه کمک کنند.
بسته بندی مواد غذایی و نوشیدنی
صنعت غذا و نوشیدنی از رباتهای تعاونی در عملیات بسته بندی سود زیادی میبرد. رباتهای مشارکتی میتوانند کارهایی مانند مرتبسازی، چیدن، بستهبندی، برچسبگذاری و پالتبندی محصولات غذایی و نوشیدنی را انجام دهند. با حرکات دقیق و ملایم، کوباتها کیفیت محصول را حفظ میکنند و در عین حال کارایی و توان عملیاتی خطوط بسته بندی را بهبود میبخشند.
مبلمان و لوازم خانگی
رباتهای مشارکتی داراییهای ارزشمندی در تولید مبلمان، لوازم خانگی و سایر کالاهای خانگی هستند. آنها میتوانند در کارهایی مانند برش چوب یا سایر مواد، سوراخ کردن سوراخ، سنباده زدن سطوح، مونتاژ اجزا و حتی رنگ آمیزی یا پوشش کمک کنند، که منجر به فرآیندهای تولید کارآمد و کیفیت محصول ثابت میشود.
داروها
در صنعت داروسازی، رباتهای مشارکتی سهم قابل توجهی در تولید داروها، مواد بستهبندی و لوازم پزشکی دارند. کوباتها در محیطهای دقیق و استریل عالی هستند، وظایفی مانند بستهبندی دارو، برچسبگذاری، مرتبسازی، بازرسی و جابجایی اقلام دارویی حساس را انجام میدهند و از رعایت استانداردها و مقررات کیفیت دقیق اطمینان میدهند.
لوازم آرایشی و بهداشتی
رباطهای مشارکتی در صنعت لوازم آرایشی برای بسته بندی و جابجایی موثر محصولات آرایشی کاربرد پیدا میکنند. آنها میتوانند در کارهایی مانند پر کردن ظروف، برچسب زدن، مرتب سازی، بازرسی یکپارچگی محصول و حتی استفاده از مقادیر ثابت فرمولاسیون کمک کنند. کوباتها افزایش بهره وری، دقت و جذابیت زیبایی را در تولید کالاهای آرایشی تضمین میکنند.
پوشاک
رباطهای مشارکتی نقش مهمیدر تولید پارچه و پوشاک دارند و اتوماسیون و دقت را در مراحل مختلف تولید ارائه میدهند. آنها میتوانند به برش پارچه، دوخت، گلدوزی، تا کردن و بسته بندی، کاهش کار دستی، افزایش سرعت تولید و حفظ کیفیت ثابت در صنایع نساجی و پوشاک کمک کنند.
چاپ سه بعدی
رباتهای مشارکتی را میتوان در گردشهای کاری پرینت سه بعدی ادغام کرد و کارایی و پس پردازش قطعات چاپی را افزایش داد. آنها میتوانند در کارهایی مانند بارگیری و تخلیه صفحات ساختمانی، برداشتن قطعات تمام شده، سنباده کاری، پرداخت، یا اعمال پوششهای سطحی، ساده سازی فرآیند تولید مواد افزودنی و بهبود بهره وری کلی کمک کنند.